NOTICIAS DE BUCEO
Ahora los robots marinos vuelan solos

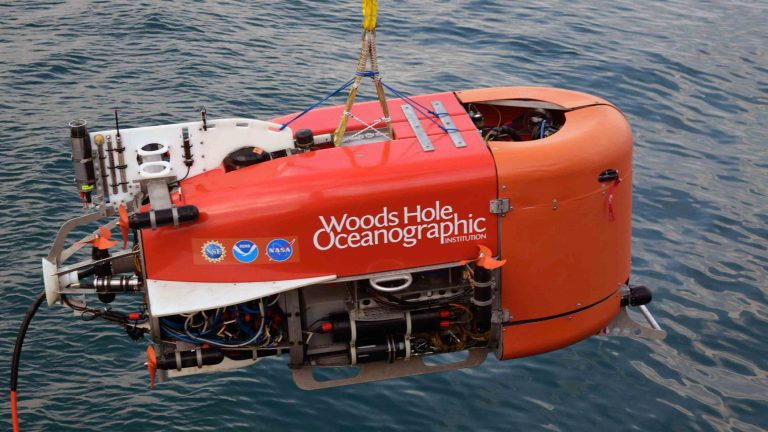
Imagen: Evan Lubofsky, Institución Oceanográfica Woods Hole.
El primer caso conocido de un robot submarino que toma una muestra sedimentaria de forma autónoma se produjo en Kolumbo, un volcán activo a 500 metros de profundidad frente a la isla griega de Santorini, en el Egeo.
El brazo robótico que tomó la muestra para un equipo internacional de investigadores fue montado en un vehículo híbrido operado a distancia llamado Nereid Under Ice (NUI), desarrollado por la Institución Oceanográfica Woods Hole (WHOI) de Massachusetts.
"Que un vehículo tomara una muestra sin un piloto al volante fue un gran paso adelante", dijo el científico del WHOI Rich Camilli. "Uno de nuestros objetivos era desechar el joystick y pudimos hacerlo".
Los investigadores estaban estudiando el ambiente “duro y cargado de químicos” de Kolumbo y sus formas de vida microbianas, al mismo tiempo que exploraban hasta qué punto los robots oceánicos podrían explorar sin intervención humana.
La NUI, del tamaño de un automóvil inteligente, emplea software de planificación automatizada basado en inteligencia artificial, incluido un planificador llamado Spock.
Esto le permitió decidir qué sitios volcánicos visitar y tomar muestras de forma autónoma, succionándolas a través de una “manguera de muestra para sorber”.
Según el científico Gideon Billings de la Universidad de Michigan, cuyo código se utilizó para recolectar la primera muestra, dicha automatización permitirá a la NASA explorar mundos oceánicos más allá de nuestro sistema solar.
"Si tenemos esta gran visión de enviar robots a lugares como Europa y Encelado [las lunas de Júpiter y Saturno, respectivamente], en última instancia necesitarán trabajar de forma independiente y sin la ayuda de un piloto", dijo.
11 de enero de 2020
La investigación futura, en la que también participarán el Centro Australiano de Robótica de Campo, el Instituto de Tecnología de Massachusetts y el Instituto Tecnológico Toyota de Chicago, incluirá la formación robots oceánicos para ver como pilotos de ROV, utilizando tecnología de “seguimiento de la mirada” y construyendo una interfaz de lenguaje humano para permitir a los científicos dirigirse a los robots directamente, en lugar de a través de un piloto.
"Eventualmente podremos ver una red de robots oceánicos cognitivos donde haya una inteligencia compartida que abarque toda una flota, con cada vehículo trabajando de manera cooperativa como abejas en una colmena", dijo Camilli. "Irá mucho más allá de perder el joystick".
El proyecto fue financiado por la NASA y la Iniciativa Nacional de Robótica de la Fundación Nacional de Ciencias.

